
All categories
Featured selections
Trade Assurance
Buyer Central
Help Center
Get the app
Become a supplier
(341 منتجًا متوفرة)








روبوتات Arduino رباعية الدفع هي آلات متعددة الاستخدامات وقوية توجد تطبيقاتها في مجالات مختلفة، بما في ذلك البحث والتعليم والترفيه. تُستخدم لاستكشاف التضاريس الوعرة، بما في ذلك الجبال والغابات والمسارات الوعرة. بالإضافة إلى ذلك، تُستخدم في عمليات البحث والإنقاذ، وكذلك في البحث لدراسة التغيرات البيئية وسلوك الحياة البرية. تقدم هذه الروبوتات تجارب تعلم عملية، مما يسمح للطلاب باكتساب مهارات عملية في البرمجة والإلكترونيات والهندسة الميكانيكية. يمكن أيضًا تخصيصها لمشاريع محددة، مما يسمح للمستخدمين بإضافة مستشعرات وكاميرات ومعدات أخرى لتعزيز وظائفها. علاوة على ذلك، يتم استخدام روبوتات Arduino رباعية الدفع في المسابقات والأنشطة الترفيهية، مما يوفر منصة للإبداع والابتكار.
تُعد روبوتات Arduino رباعية الدفع منصات متعددة الاستخدامات لاستكشاف الروبوتات والأتمتة. تأتي هذه الآلات في أنواع مختلفة، تم تصميم كل منها لتطبيقات ووظائف محددة. من خلال فهم أنواع روبوتات Arduino ذات الدفع الرباعي، يمكن لعشاق هذه الروبوتات اختيار الروبوت المناسب لمشاريعهم وتخصيصه لتناسب احتياجاتهم.
روبوتات متابعة الخط:
تم تطوير روبوتات متابعة الخط للتحرك على طول مسار محدد. تُستخدم هذه الروبوتات في التعليم لتعليم مفاهيم الروبوتات والبرمجة. تُستخدم أيضًا في التطبيقات العملية مثل أنظمة التسليم الآلي ومهام الفحص في الصناعات. يمكن تخصيص هذه الروبوتات لمتابعة أنماط معقدة وتكامل مستشعرات إضافية لاكتشاف العقبات وتجنبها. هذا يعزز قدراتها ويوسع نطاق تطبيقاتها. بالإضافة إلى ذلك، يمكن استخدامها في المسابقات، مما يسمح لعشاق هذه الروبوتات بعرض مهاراتهم في البرمجة والهندسة في تحديات متابعة الخط.
روبوتات تجنب العقبات:
تم تصميم روبوتات تجنب العقبات للتحرك بحرية في البيئة. تُستخدم هذه الروبوتات على نطاق واسع في الصناعات لمهام التعامل مع المواد والفحوصات والمراقبة. يمكن تكييفها للعمل في بيئات ديناميكية، مما يسمح بتعديل المسار في الوقت الفعلي وتكامل مستشعرات متقدمة لاكتشاف العقبات بشكل أفضل. تُستخدم هذه الروبوتات في المسابقات حيث يُظهر المشاركون خبرتهم في الهندسة والبرمجة في تحديات تجنب العقبات. تتمتع هذه الآلات بتطبيقات في البيئات المنزلية لمهام التنظيف وفي البحث لجمع البيانات في بيئات غير منظمة.
روبوتات التحكم عن بعد:
يتم تشغيل روبوتات التحكم عن بعد من خلال أجهزة خارجية مثل الهواتف الذكية والحواسيب وأجهزة الألعاب. لديها تطبيقات في الترفيه مثل الألعاب وفي بيئات التعليم حيث تُستخدم في مشاريع الترميز والإلكترونيات. بالإضافة إلى ذلك، يمكن تخصيصها لتكامل مستشعرات وكاميرات مختلفة، مما يعزز وظائفها. يمكن استخدام هذه الروبوتات في المسابقات حيث يُظهر المشاركون مهاراتهم في الهندسة والبرمجة. علاوة على ذلك، يمكن نشرها في مهام العالم الحقيقي مثل المراقبة والفحوصات، مما يوسع قابليتها للاستخدام إلى ما هو أبعد من الترفيه.
روبوتات المراقبة:
تم تطوير روبوتات المراقبة لمهام المراقبة والفحص. تم تجهيز هذه الروبوتات بالكاميرات والمستشعرات لتعزيز قدراتها على المراقبة. هذا يجعلها مثالية لأغراض الأمن. يمكن أيضًا استخدامها في بيئات خطيرة جدًا على البشر للدخول إليها. روبوتات المراقبة رباعية الدفع قابلة للتخصيص. يمكن للمستخدمين إضافة كاميرات حرارية وكاشفات حركة ومستشعرات أخرى لتحسين الوظائف. يمكن أيضًا برمجة هذه الروبوتات لاكتشاف التوغلات وإرسال تنبيهات في الوقت الفعلي، مما يجعلها أدوات قيمة لإجراءات الأمن الاستباقية.
روبوتات التعدين:
تم تصميم روبوتات التعدين خصيصًا للمهام المتعلقة بالتعدين. هذه الروبوتات قوية ومتينة، مما يسمح لها بالعمل في بيئات صعبة. يمكن تجهيز روبوتات التعدين بكاميرات ومستشعرات الغاز وكاشفات الإشعاع لتعزيز قدراتها على المراقبة والفحص. يمكن أيضًا التحكم بها عن بعد أو برمجتها للعمل بشكل مستقل، مما يضمن السلامة في بيئات خطرة على البشر للدخول إليها. بالإضافة إلى ذلك، فهي مفيدة في البحث عن مراقبة البيئة وجمع البيانات في التضاريس التي يصعب الوصول إليها.
عند اختيار روبوت Arduino رباعي الدفع، يجب مراعاة العديد من العوامل لضمان ملاءمته للغرض المقصود وتقديم الأداء المطلوب. يجب أن يبدأ المرء بالنظر إلى تنوع تضاريس الروبوت. هذه الروبوتات رائعة للتضاريس الوعرة مثل الحصى والتراب والصخور. لديهم أيضًا أداء أفضل وجر أفضل على التضاريس الوعرة من روبوتات الدفع ثنائي العجلات. يمكن لهذه الروبوتات التنقل في التضاريس الصعبة. كما أنها مناسبة للأسطح الداخلية والناعمة. يمكنها التكيف بسهولة مع التضاريس المختلفة.
يجب أيضًا مراعاة حجم الروبوت وقدرته على تحمل الوزن. هذا مهم عند استخدام الروبوت لتطبيقات محددة. يحدد حجم الروبوت الوزن الذي يمكنه حمله. إذا كان الروبوت سيُستخدم لتطبيقات محددة، فمن المهم إجراء معدات إضافية لضمان تصميمه ليناسب الغرض المقصود. تصميم وبناء الروبوت مهم أيضًا لضمان متانته وقدرته على تحمل الاستخدام المقصود. يجب أن يكون متينًا بما يكفي للتعامل مع المعالجة القاسية أثناء التشغيل.
يجب على المرء أيضًا مراعاة نوع المستشعرات وموقعها. المستشعرات ضرورية لاكتشاف العقبات وضمان متابعة الروبوت للمسار المطلوب. يجب تثبيت المستشعرات بزوايا صحيحة لضمان قدرة الروبوت على اكتشاف العقبات بسرعة. سيعزز ذلك قدرة الروبوت على التنقل بسلاسة دون الاصطدام بالعقبات. يتم التحكم في روبوتات Arduino رباعية الدفع من خلال طرق مختلفة، مثل Bluetooth و Wi-Fi و RF ومن خلال تطبيقات الهاتف المحمول. يجب اختيار طريقة التحكم الأكثر ملاءمة وسهولة الاستخدام لضمان اتصال سلس بين المستخدم والروبوت. يُعد الروبوت الذي يتمتع بواجهة بسيطة وسهلة الاستخدام سهل البرمجة والتشغيل.
يُعد نظام طاقة الروبوت مهمًا لأنه يحدد أدائه. عند استخدام روبوت Arduino رباعي الدفع، اختر روبوتًا به بطارية قوية تدوم لفترة طويلة ويمكنها التعامل مع العمل الشاق. يجب أيضًا مراعاة نوع محرك الروبوت ومستوى أدائه. تُعد المحركات عديمة الفرشاة أفضل هذه الروبوتات لأنها توفر كفاءة أفضل وعمرًا أطول وأداءً محسنًا.
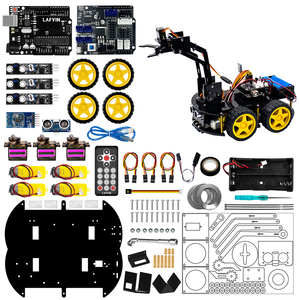
يعتمد تصميم روبوت Arduino رباعي الدفع على آلية دفع رباعية العجلات تضمن حصول عجلاته الأربع على الطاقة ودفع الروبوت للتحرك. تم تصميم الروبوت مع زوجين من العجلات على جانبيه الأيمن والأيسر، والتي تكون متوازية مع بعضها البعض. يضمن هذا النوع من التصميم أن الروبوت يمكنه التحرك بسرعة وأن يكون ثابتًا عند الدوران. تتميز روبوتات Arduino رباعية الدفع باستخدام Arduino كلوحة تحكم دقيق، مما يجعلها قابلة للبرمجة. كما أنه يحتوي على نظام دفع رباعي العجلات يضم أربع عجلات وعجلتين توجيه وعجلتين دفع. يتميز هذا الروبوت بتصميم يضم الشاسيه في الأسفل والجسم الرئيسي في الأعلى والعجلات على الجوانب. كما أنه يحتوي على مصدر طاقة ونظام تحكم، وهما البطاريات ولوحة Arduino على التوالي. تم تصميم الجسم ليصبح مسطحًا ومستطيلًا لسهولة تركيب المكونات، بينما تم تصميم عجلات التوجيه للمساعدة في توازن الروبوت. تم تصميم عجلات الدفع ليتم تشغيلها بواسطة المحركات حتى يمكن للروبوت التحرك في جميع الاتجاهات. يستخدم روبوت Arduino رباعي الدفع الدفع الرباعي لأنه ثابت ولديه جر جيد ويمكنه تسلق الألعاب.
يتطلب بناء روبوت Arduino رباعي الدفع مراعاة تدابير السلامة لحماية كل من الروبوت ومحيطه بالإضافة إلى الأفراد المشاركين في بنائه وتشغيله. فيما يلي بعض الاعتبارات الأساسية للسلامة:
إدارة الطاقة
استخدم منظمات الجهد المناسبة لضمان حصول Arduino والمكونات الأخرى على طاقة مستقرة.
نفذ حماية من التيار الزائد، مثل الصمامات أو قواطع الدائرة، لمنع التلف بسبب التيار الزائد.
اختيار المكونات
اختر مكونات مصممة للجهود والتيارات التي سيتم استخدامها في الروبوت.
استخدم موردين ذوي سمعة طيبة واقرأ المواصفات بعناية لضمان ملاءمة الأجزاء للتطبيق.
السلامة البدنية
احتفظ بمنطقة العمل مرتبة وخالية من الفوضى لمنع الحوادث والتلف المكونات.
عند استخدام الأدوات، ارتدِ معدات السلامة المناسبة مثل النظارات الواقية والقفازات والأقنعة إذا لزم الأمر.
السلامة الإلكترونية
تجنب العمل على الدوائر عند تشغيلها لمنع الصدمات الكهربائية والتلف المكونات.
يجب تفريغ المكثفات بشكل صحيح قبل العمل على دوائر عالية الجهد لتجنب الصدمات الكهربائية.
الاختبار والنماذج الأولية
اجمع الروبوت بالكامل قبل تجميعه بالكامل. اختبر الأجزاء الصغيرة أولاً لضمان وظائفها.
اختبر الدوائر والتصميمات الجديدة على لوحة اختبار أو لوحة نموذج أولي قبل تنفيذها على الروبوت.
لضمان بناء روبوت Arduino رباعي الدفع، من المهم الالتزام بمبادئ الجودة لضمان الوظائف والمتانة والأداء. فيما يلي بعض الاعتبارات الأساسية:
جودة المكونات
اختر لوحات Arduino عالية الجودة والمحركات وسائقين المحركات والمكونات الأخرى من مصادر موثوقة. يقلل هذا من مخاطر حدوث عطل ويحسن جودة الروبوت بشكل عام.
الدقة والدقة
يجب أن يتم تصميم وبناء الروبوت بدقة. يجب أن يشمل ذلك القياسات الدقيقة والمحاذاة الصحيحة والأسلاك الأنيقة.
ينصح باستخدام طابعة ثلاثية الأبعاد للأجزاء التي تتطلب دقة عالية مثل أقواس التركيب والعجلات والمرفقات الأخرى.
جودة الكود
تأكد من أن الكود المكتوب لـ Arduino فعال ومنظم ومختبر بدقة. يضمن هذا التشغيل السلس ويقلل من مخاطر المشكلات المتعلقة بالبرامج.
إدارة البطارية
يجب اختيار البطاريات بناءً على السعة والجهد لضمان تناسبها مع متطلبات طاقة الروبوت. يجب استخدام تقنيات إدارة البطارية المناسبة لضمان شحن البطارية وتفريغها وصيانتها بشكل مناسب لزيادة عمر البطارية وأدائها.
الاختبار والتكرار
يجب إجراء اختبارات شاملة للروبوت لتحديد أي مشكلات أو مشاكل وإصلاحها. يجب اختبار بيئات وسيناريوهات مختلفة لضمان الأداء المتسق. يجب تحسين الروبوت من خلال تكرارات بناءً على الملاحظات التي تم الحصول عليها من الاختبار لتعزيز جودته ووظائفه.
ما هو الدفع الرباعي في روبوت Arduino؟
الدفع الرباعي (4WD) يعني أن الروبوت يحتوي على عجلات في زواياه الأربع. يتم تشغيل جميع العجلات بواسطة محركات بحيث يمكنها التحرك على أسطح مختلفة.
هل يمكن لروبوت Arduino رباعي الدفع تجنب العقبات؟
نعم، يمكن ذلك. يستخدم الروبوت مستشعرات بالموجات فوق الصوتية لاكتشاف أي عقبات في مساره. يمكنه تغيير الاتجاه تلقائيًا وتجنب الاصطدامات.
ما هي السرعة القصوى لروبوت Arduino رباعي الدفع؟
تبلغ السرعة القصوى للروبوت 0.8 متر في الثانية. يمكنه التحرك بشكل أسرع أو أبطأ، اعتمادًا على السطح الذي يسير عليه.
كم من الوقت يدوم تشغيل روبوت Arduino رباعي الدفع على الطاقة؟
يمكن تشغيل الروبوت لمدة 4 ساعات على الطاقة. يستخدم بطارية ليثيوم 7.4 فولت لساعات عمل متواصلة أطول.















